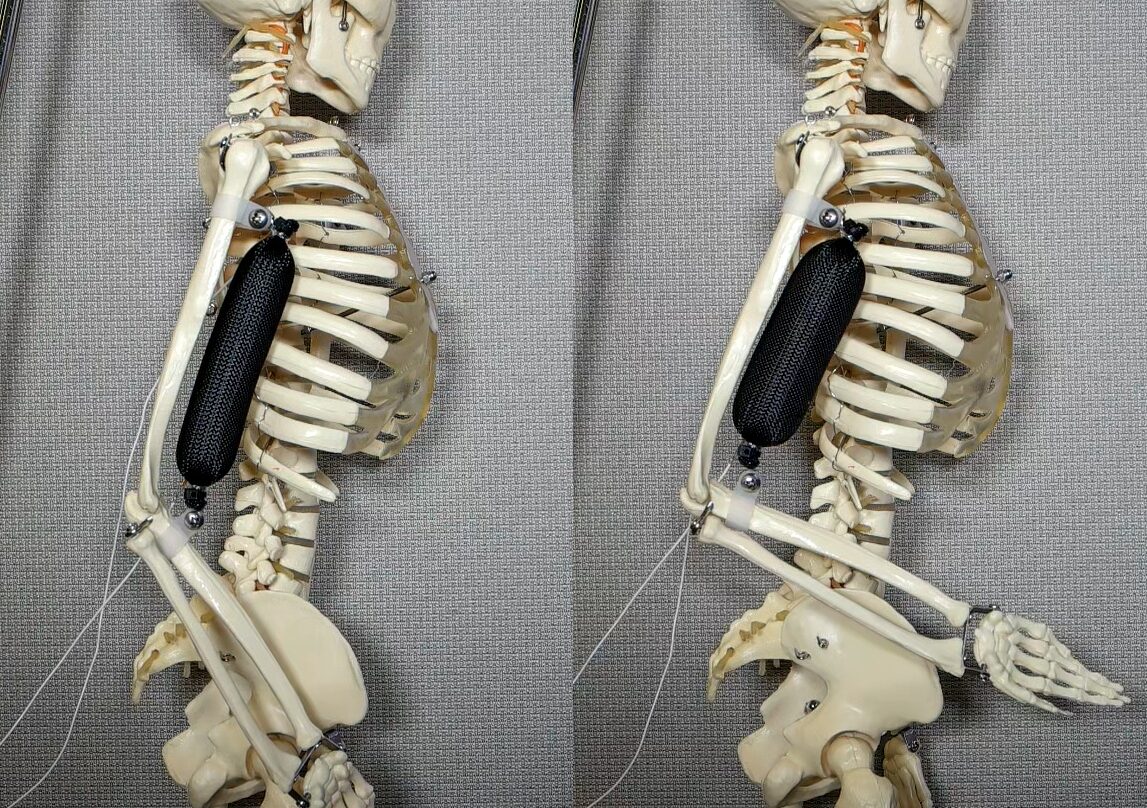
Científicos de Columbia Engineering dirigidos por Hod Lipson, profesor de ingeniería mecánica, ha desarrollado un tejido artificial imprimible en 3D con una capacidad de expansión intrínseca que no requiere un compresor externo o equipos de alto voltaje como los músculos previos requeridos en este ámbito. El nuevo material tiene una densidad de deformación (extensión por gramo) que es 15 veces mayor que el músculo natural, y puede levantar 1.000 veces su propio peso, según la descripción de estos hallazgos publicados por Nature Communications.
Hemos superado una de las barreras finales para hacer robots realistas
PUBLICIDAD
"Hemos estado dando grandes pasos hacia la fabricación de mentes de robots, pero los cuerpos de robots siguen siendo primitivos", dijo Hod Lipson. "Esta es una gran pieza del rompecabezas y, al igual que la biología, el nuevo músculo accionado puede ser moldeado y reestructurado de mil maneras. Hemos superado una de las barreras finales para hacer robots realistas".
Hasta ahora ningún material ha sido capaz de funcionar como un músculo blando debido a la dificultad para exhibir las propiedades deseadas de alto esfuerzo de accionamiento y alta deformación. Las tecnologías existentes se basan típicamente en el inflado neumático o hidráulico de pieles de elastómero que se expanden cuando se les suministra aire o líquido. Los compresores externos y el equipo de regulación de la presión requerido para tales tecnologías dificultan la miniaturización y la creación de robots que pueden moverse y trabajar de forma independiente.
Un paso hacia los humanoides
Inspirado en los organismos vivos, la robótica de material blando es muy prometedora para las áreas en las que los robots necesitan ponerse en contacto e interactuar con los seres humanos, como la fabricación y la asistencia sanitaria. A diferencia de los robots rígidos, los robots blandos pueden reproducir el movimiento natural - agarre y manipulación - para proporcionar asistencia médica y de otro tipo, realizar tareas delicadas o recoger objetos suaves.
Puede empujar, tirar, doblar, girar y levantar peso, es el material equivalente artificial más cercano que tenemos a un músculo natural
"Nuestro material funcional suave puede servir como músculo blando robusto, posiblemente revolucionando la forma en que las soluciones robóticas blandas están diseñadas hoy", asegura el autor principal del estudio Aslan Miriyev. "Puede empujar, tirar, doblar, girar y levantar peso, es el material equivalente artificial más cercano que tenemos a un músculo natural", asegura.
Para lograr un musculo accionado utilizaron una matriz de caucho de silicona con etanol distribuida en microburbujas. La solución combinó las propiedades elásticas y los atributos de cambios de volumen extremos de otros sistemas materiales, con la facilidad de fabricar, el bajo costo y la producción con materiales ambientalmente seguros.
Después de ser impreso 3D en la forma deseada, el músculo artificial es accionado eléctricamente usando un alambre resistivo delgado y de baja potencia (8V). Se probó en una variedad de aplicaciones robóticas donde mostró una capacidad significativa de expansión-contracción, siendo capaz de expandirse hasta 900% cuando se calienta eléctricamente a 80° C. A través de controles de ordenador, la unidad autónoma es capaz de realizar tareas de movimiento en casi cualquier diseño.
Los investigadores seguirán trabajando sobre este desarrollo, incorporando materiales conductores para reemplazar el cable incrustado, acelerando el tiempo de respuesta del músculo y aumentando su vida útil. A largo plazo, involucrarán inteligencia artificial para aprender a controlar el músculo, lo cual puede ser un último hito para replicar el movimiento natural.
Te puede interesar


Lo más visto